现代工厂如同一个复杂的电磁战场:变频器产生高频谐波、电焊机引发瞬时浪涌、无线设备发射射频干扰……身处其中的机器人若电磁兼容性(EMC)不足,轻则通信中断、定位漂移,重则控制系统死机、执行器误动作,直接导致生产线停摆。EMC测试正是模拟这一严酷环境,验证机器人”既不扰人、也不被人扰”的双重能力。
一、EMC测试的两大维度
1. 电磁干扰(EMI)——机器人是否”干净”?
- 辐射发射:测量机器人工作时向空间辐射的电磁噪声(30MHz~6GHz),确保不干扰周边设备。
- 传导发射:测量通过电源线/信号线传导至电网的噪声(150kHz~30MHz),避免污染公共电网。
2. 电磁抗扰度(EMS)——机器人是否”强壮”?
- 静电放电(ESD):±8kV接触放电/±15kV空气放电,模拟人体触碰引发的瞬时高压[[35]]
- 电快速瞬变(EFT):±2kV脉冲群注入电源/信号线,模拟继电器切换产生的干扰
- 浪涌(Surge):±1kV/2kV组合波,模拟雷击或大功率设备启停引起的电网波动
- 射频电磁场:10V/m场强照射,验证在无线基站、对讲机环境下的稳定性
二、机器人EMC失效的典型场景
| 干扰源 | 受影响部件 | 故障现象 |
|---|---|---|
| 邻近变频器 | 编码器信号线 | 位置反馈跳变,轨迹跟踪失准 |
| 电焊机启停 | 控制器电源 | 系统重启、参数丢失 |
| 手持对讲机 | 无线通信模块 | 指令丢失、急停误触发 |
| 人体静电 | 示教器触摸屏 | 屏幕乱码、程序异常终止 |
三、机器人EMC设计的四大支柱
- 屏蔽:控制柜采用镀锌钢板(≥1mm)并确保门缝导电衬垫连续;动力线与信号线分槽敷设,间距>200mm。
- 滤波:电源入口配置π型滤波器;伺服驱动器输出端加装dV/dt滤波器抑制高频噪声。
- 接地:采用单点接地避免地环路;屏蔽层360°环接机壳,禁止”猪尾巴”式接地。
- 软件容错:通信协议增加CRC校验与重传机制;关键参数采用三取二表决算法。
四、测试标准与认证要求
- 工业机器人:GB/T 19397-2003《工业机器人电磁兼容性试验方法》[[34]]、IEC 61000-6-2/-4
- SCARA机器人:T/CES 253-2023《SCARA机器人电磁兼容抗扰度试验》[[3]]
- CE认证:必须符合EMC指令2014/30/EU,通过EN 61000-6系列标准测试[[40]]
- 北美市场:FCC Part 15 Class A(工业设备)或Class B(家用设备)
总结
EMC性能是机器人在复杂工业环境中可靠运行的”隐形铠甲”。优秀的EMC设计不仅满足法规认证要求,更能显著降低现场故障率,提升用户信任度。企业应将EMC纳入产品开发早期阶段,通过”设计-仿真-测试-整改”闭环,打造真正适应工业现场的稳健型机器人产品。
专业机器人测试服务支持
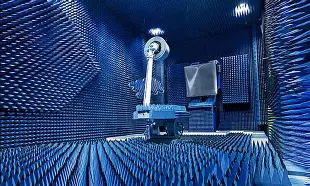
晟安检测拥有3m法半电波暗室、屏蔽室及全套EMC测试系统,可依据IEC 61000-4/-6、GB/T 17626等标准,为各类机器人提供:
- 辐射/传导发射预兼容与认证级测试
- 全套抗扰度测试(ESD/EFT/Surge/RS/CS)
- EMC失效根因分析与整改验证
- CE/FCC/CCC认证一站式服务
我们助力机器人企业跨越电磁兼容门槛,赢得全球市场准入通行证。